El robot delta del IPN ahora con visión artificial
Por Érika Rodríguez
Zacatecas, Zacatecas. 13 de julio de 2018 (Agencia Informativa Conacyt).- Un robot de tipo delta tiene la capacidad de mover objetos de manera muy rápida, mediante las funciones básicas de pick and place —recoger y mover—; su aplicación predominante es en la industria, por ejemplo, en una ensambladora de carros. En la Unidad Profesional Interdisciplinaria de Ingeniería, campus Zacatecas, del Instituto Politécnico Nacional (UPIIZ IPN), un grupo de estudiantes construyó un robot delta, que desde 2016 ha servido para realizar prácticas académicas y trabajos de investigación, que dieron como resultado la última implementación, que consiste en un sistema de visión artificial.
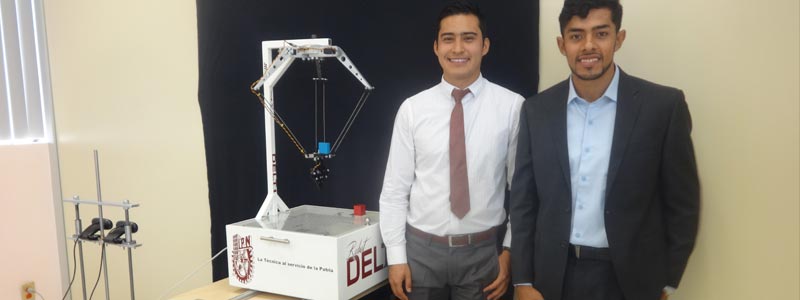
Este sistema de visión artificial estéreo fue integrado por los ahora ingenieros en mecatrónica Pedro Antonio Murillo Carrillo y Jesús Alberto Basurto Estrella, bajo asesoría del maestro en ciencias Omar Désiga Orenday, con la finalidad de dar al robot delta un control más preciso sobre sus movimientos, ya que anteriormente, aunque el usuario tenía intervención en la dirección del traslado de los objetos, carecía de la certeza de que la posición en donde fuesen colocados por la pinza fuera la correcta.
 “Entonces decidimos implementar la visión artificial estéreo, que es una simulación artificial de la visión humana, porque aunque existen muchos tipos de visión artificial, esta se asemeja y hace una caracterización y triangulación con base en cálculos para deducir la profundidad, al igual que lo hace la visión humana. Esto sirve para que las coordenadas de un plano que tenga enfrente sean fáciles de calcular desde cualquier posición, pero incluyendo la profundidad, al igual que nosotros como humanos percibimos si algo está cerca o lejos. Este fue el reto, que aunque se dice fácil, requirió de muchos cálculos matemáticos y programación para lograrlo y esto fue lo más importante de nuestro proyecto”, explicó Pedro Murillo.
“Entonces decidimos implementar la visión artificial estéreo, que es una simulación artificial de la visión humana, porque aunque existen muchos tipos de visión artificial, esta se asemeja y hace una caracterización y triangulación con base en cálculos para deducir la profundidad, al igual que lo hace la visión humana. Esto sirve para que las coordenadas de un plano que tenga enfrente sean fáciles de calcular desde cualquier posición, pero incluyendo la profundidad, al igual que nosotros como humanos percibimos si algo está cerca o lejos. Este fue el reto, que aunque se dice fácil, requirió de muchos cálculos matemáticos y programación para lograrlo y esto fue lo más importante de nuestro proyecto”, explicó Pedro Murillo.
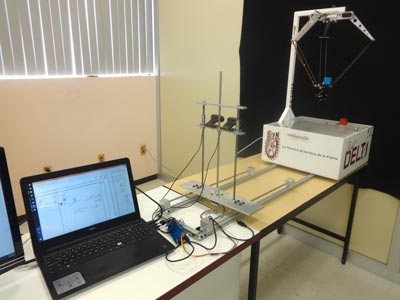
Para implementar esta visión artificial, el equipo de ingenieros requirió 18 meses de trabajo, en donde los primeros seis investigaron la metodología y justificación para emprenderlo, seis en diseñar la estructura, programar el software, programas a utilizar y posibles resultados a obtener, y los últimos seis meses en armar todo el proyecto en físico. El equipo utilizó tecnologías como el programa gráfico llamado LabVIEW, ya que aunque se trata de un robot mecánico, la implementación de visión artificial requirió una mayor labor enfocada en software y programación.
“La idea principal de este proyecto es que sirviera para autoequipar la escuela, ya que no contamos con muchos robots para hacer prácticas y este nos ha servido muchísimo para seguir aprendiendo y utilizarlo de forma didáctica. Haberle implementado esta nueva característica servirá para que las generaciones futuras puedan precisar mejor sus movimientos y posteriormente modificarlo, contribuir a su perfeccionamiento o agregarle más funciones, como en su momento lo hicimos nosotros”, especificó Jesús Basurto.
Entre las características a implementar en un futuro es acortar el tiempo de respuesta del robot ya que, aunque es bueno, los jóvenes especifican que su velocidad aún no es la ideal. Otra es la precisión, para mejorar la posición de los objetos. “Esto suena como poco, porque el robot ya está construido, pero no se trata de un trabajo trivial, sino que requiere de su tiempo y dedicación”, finalizó.

![]() • Ing. Pedro Antonio Murillo Carrillo
• Ing. Pedro Antonio Murillo Carrillo
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
• Ing. Jesús Alberto Basurto Estrella
![]() Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
 Descargar fotografías.
Descargar fotografías.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.