Diseñan vehículo robótico para explorar zonas agrestes
Por Karla Navarro
Ensenada, Baja California. 14 de noviembre de 2018 (Agencia Informativa Conacyt).- Los robots diseñados para misiones espaciales tienen características que son aplicables en la Tierra, como por ejemplo, su capacidad para transitar por terrenos agrestes.

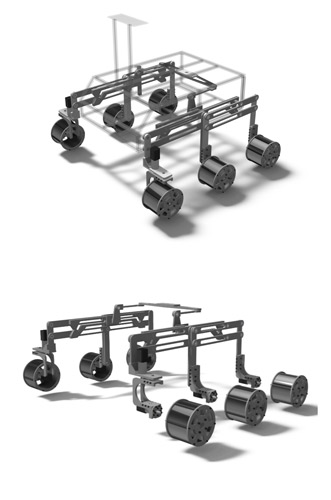
Especialistas del Centro de Investigación en Computación (CIC) del Instituto Politécnico Nacional (IPN) trabajan en el diseño y puesta en operación de un vehículo de exploración tipo rover, con el potencial para utilizarse en tareas de búsqueda en terrenos desconocidos y no estructurados.
En entrevista para la Agencia Informativa Conacyt, el doctor Juan Humberto Sossa Azuela, jefe del Laboratorio de Robótica y Mecatrónica del CIC, explicó que el diseño del vehículo robótico conlleva un proceso similar al de los robots que se desarrollan con fines de exploración espacial.
 El doctor Humberto Sossa en conferencia donde presentó los avances en el diseño del vehículo tipo rover.“No necesitamos ir a la luna o el planeta Marte para poder usar un robot de este tipo. Desde el punto de vista científico, el problema es muy interesante, ya que ofrece todo un abanico de posibilidades que va desde el diseño mecánico-eléctrico, el diseño de alimentación, de comunicación, de análisis de los materiales que debe de estar hecho para sobrevivir a temperaturas muy bajas y muy altas”.
El doctor Humberto Sossa en conferencia donde presentó los avances en el diseño del vehículo tipo rover.“No necesitamos ir a la luna o el planeta Marte para poder usar un robot de este tipo. Desde el punto de vista científico, el problema es muy interesante, ya que ofrece todo un abanico de posibilidades que va desde el diseño mecánico-eléctrico, el diseño de alimentación, de comunicación, de análisis de los materiales que debe de estar hecho para sobrevivir a temperaturas muy bajas y muy altas”.
Aclaró que aunque el proceso de desarrollo del robot es similar al de los robots espaciales, se deben considerar las diferencias en cuanto a ambientes adversos a los que se enfrentará el robot una vez que se encuentre en operaciones.
A diferencia de las condiciones en la Tierra, los robots diseñados para misiones espaciales deben integrarse de materiales que soporten temperaturas mucho más extremas que las que podrían tener en nuestro planeta, además de otros factores como la lluvia cósmica.
No obstante, aunque el vehículo robótico para la Tierra no se enfrenta a ese tipo de condiciones, también se considera su operación en situaciones adversas, donde puede encontrarse en su contra con agua, lodo y polvo, que exigen otro tipo de diseño.
En sus primeras fases
 El vehículo robótico en diseño no se centra en una aplicación específica, pero el investigador adelantó que podrá realizar tareas tan variadas que será útil para actividades económicas como la minería, labores de rescate o en la toma de muestras que podrían ser analizadas por el propio robot.
El vehículo robótico en diseño no se centra en una aplicación específica, pero el investigador adelantó que podrá realizar tareas tan variadas que será útil para actividades económicas como la minería, labores de rescate o en la toma de muestras que podrían ser analizadas por el propio robot.
“Todas aquellas tareas de exploración en donde yo pueda analizar dentro del mismo robot, si este viene equipado con un pequeño laboratorio, un mineral particular, poder analizar ciertas propiedades y entonces emitir el resultado vía inalámbrica a una estación remota que podría estar a varios miles de kilómetros”.
El proyecto se encuentra ahora en etapa de investigación básica y al final los especialistas obtendrán un prototipo con capacidad de operar en condiciones controladas dentro de un laboratorio.
“Si quisiéramos pasar ese prototipo a un producto que funcione en campo, entonces ya tendríamos que ver cuál es la aplicación particular que demande el sector minero o de exploración en un volcán o en un desierto, entonces habría que adaptarlo porque no se puede diseñar un robot que funcione para todas las circunstancias, sería complejo y muy caro”.
Por ahora, el vehículo de exploración tipo rover seguirá su proceso de conceptualización, diseño y puesta en operación hasta lograr su funcionalidad dentro del mismo laboratorio.

 Descargar fotografías.
Descargar fotografías.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.