Desarrollan software robot arácnido
Por Amelia Gutiérrez Solís
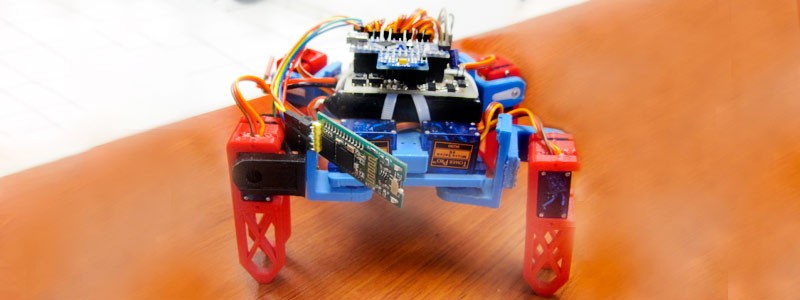
Colima, Colima. 27 de octubre de 2016 (Agencia Informativa Conacyt).- En el área de ingeniería avanzada del Instituto Tecnológico de Ciudad Guzmán (ITCG) —que forma parte del Tecnológico Nacional de México (Tecnm)—, docentes y estudiantes desarrollaron un robot arácnido con control Bluetooth.
Durante el Congreso Internacional de Investigación Academia Journals en Tecnologías Estratégicas Colima 2016, que se realizó en el Instituto Tecnológico de Colima (Itec) —también del Tecnm—, el maestro en ingeniería electrónica Carlos Enrique Maciel García, catedrático del ITCG, presentó este innovador robot para fines didácticos.
“Actualmente no existen en el mercado dispositivos para probar los algoritmos de control que se estudian en las materias de control, o los pocos que existen son económicamente inalcanzables para algunos alumnos, por lo que con esto se podrán utilizar en futuras generaciones controles P (proporcional), PI (proporcional integral), PD (proporcional derivativo) y PID (proporcional integral derivativo), además de poderlos comprender y de ser posible desarrollar sus propios algoritmos y mejorar el movimiento del robot”, explicó.
 Con este tipo de prototipos los estudiantes empiezan a hacer desarrollo tecnológico dentro de la misma institución, siendo el robot arácnido el primer producto, señaló el docente, quien agregó que posteriormente se creó un club de robótica en el ITCG.
Con este tipo de prototipos los estudiantes empiezan a hacer desarrollo tecnológico dentro de la misma institución, siendo el robot arácnido el primer producto, señaló el docente, quien agregó que posteriormente se creó un club de robótica en el ITCG.
Maciel García explicó que por medio de un proyecto de investigación obtuvieron unas impresoras 3D y con ellas se pudo generar el robot arácnido cuadrúpedo, en el cual los estudiantes diseñaron en el software especializado Altium una placa para trabajar de manera paralela los motores y los servomotores, que son motores eléctricos que pueden ser controlados tanto en velocidad como en posición.
Además señaló que el prototipo cuenta con dos transmisores Bluetooth: uno de ellos sirve para el control del dispositivo y el otro es para monitorear variables de posicionamiento.
El maestro en ingeniería electrónica dijo que los estudiantes presentaron una ponencia de este prototipo en el Centro de Investigación en Matemáticas (Cimat), en Guanajuato, y participaron en un concurso de innovación tecnológica.
“De este prototipo, los estudiantes están realizando los trámites ante el Instituto Nacional del Derecho de Autor (Indautor) para registrar el código fuente del programa como ‘Registro de Obra Programa de Cómputo’, ya que es más complicado realizar un registro ante patente o propiedad intelectual debido a la gran cantidad de cuadrúpedos que existen en la red, por lo que en este caso en lugar de proteger la parte física se busca proteger el software que diseñan para que este robot pueda avanzar. Además de que en un futuro cada alumno podrá hacer lo mismo con su propio código”, indicó Maciel García.
Mencionó que el objetivo estratégico fue crear este club de robótica, en el que actualmente participan aproximadamente 70 alumnos, casi una tercera parte de la carrera de ingeniería en electrónica del ITCG, quienes están trabajando en módulos interdisciplinarios.
Anunció que planean modificar el robot arácnido para convertirlo de un cuadrúpedo a un hexápodo y además trabajan en el diseño de un vehículo aéreo no tripulado didáctico para el posicionamiento espacial y poder hacer pruebas de algoritmos de control.


 Descargar fotografías.
Descargar fotografías.

Esta obra cuyo autor es Agencia Informativa Conacyt está bajo una licencia de Reconocimiento 4.0 Internacional de Creative Commons.